The following is a complete list of my scholarly publications. I have
research experience in
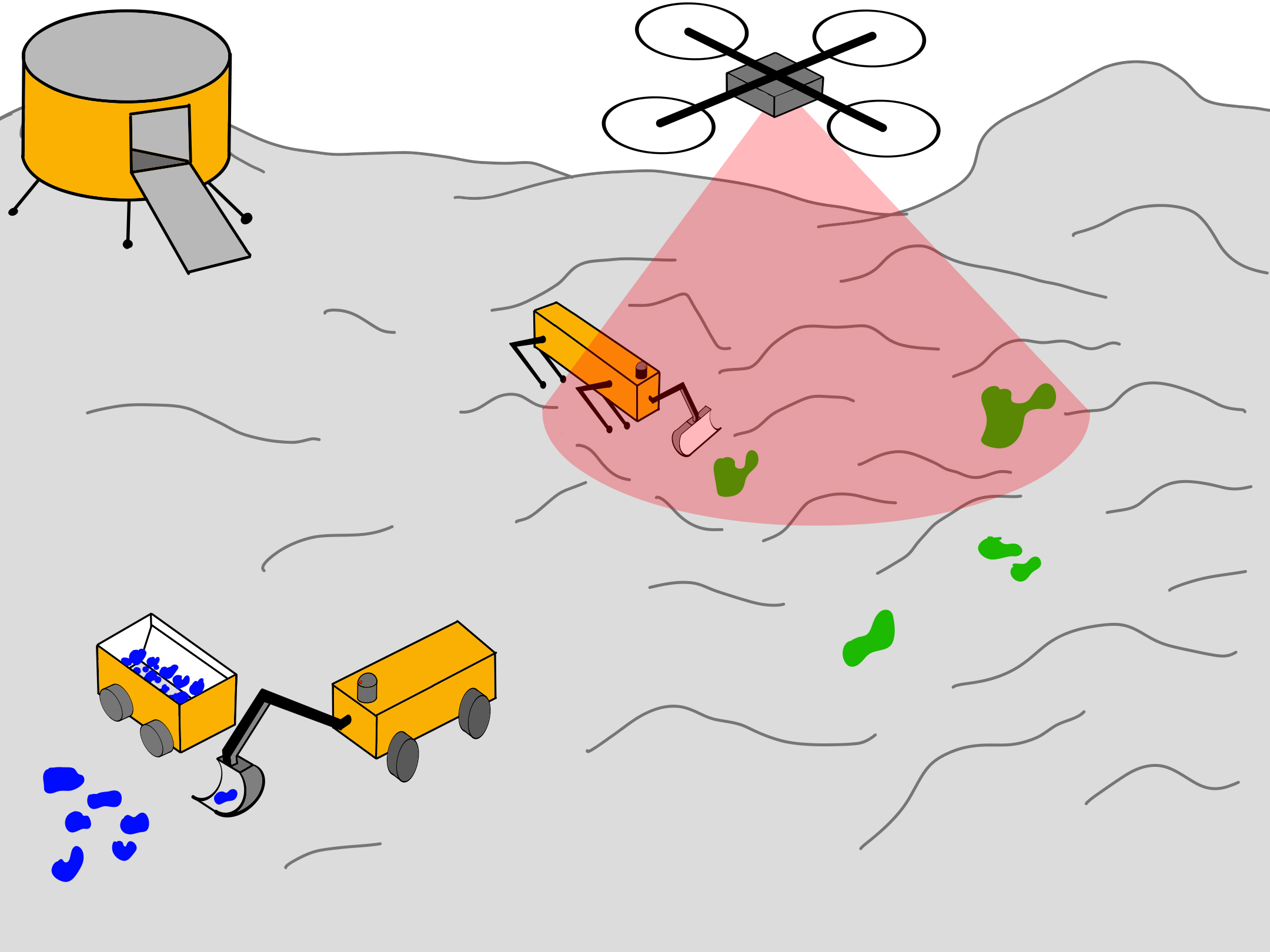
Multi-robot task allocation, Swarm Intelligence, and
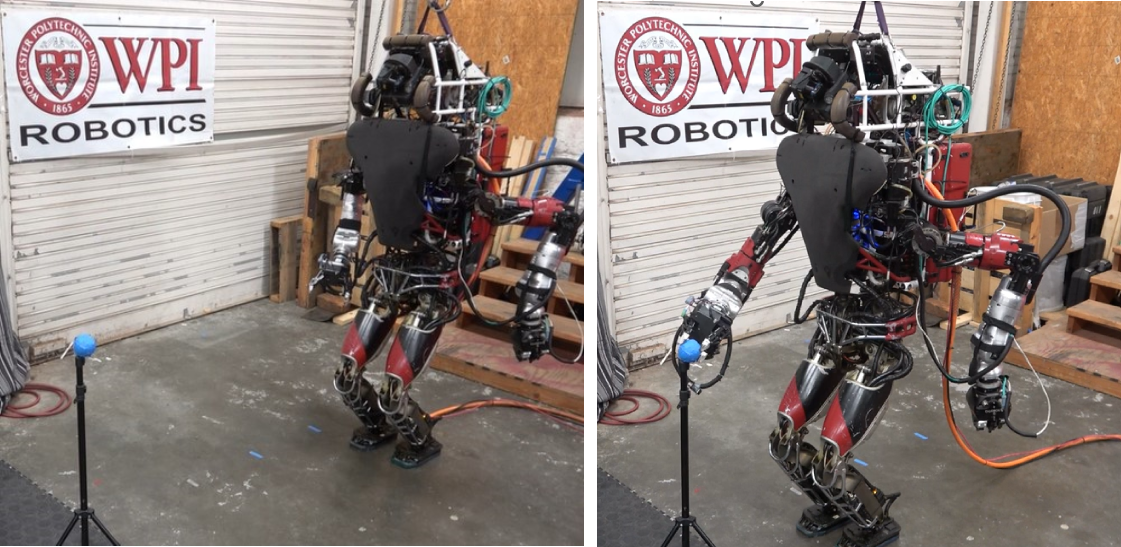
Humanoid robotics
For more information, visit my
Google Scholar page
Albert Enyedy, Ashay Aswale, Berk Calli, Michael
Gennert
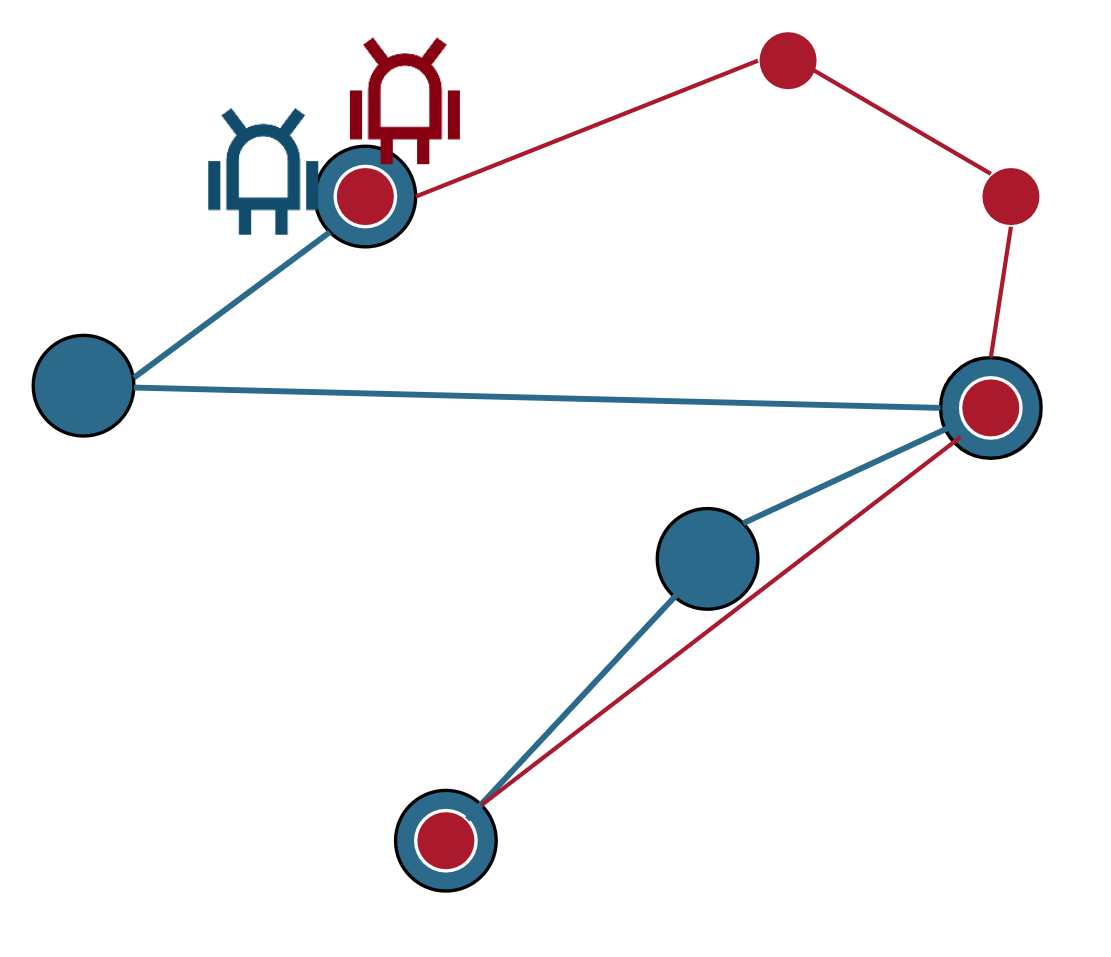
A. Aswale and C. Pinciroli, "Heterogeneous Coalition
Formation and Scheduling with Multi-Skilled Robots,"
2023 IEEE/RSJ International Conference on Intelligent Robots
and Systems (IROS), Detroit, MI, USA, 2023, pp. 5402-5409, doi:
10.1109/IROS55552.2023.10342489.
W. Babincsak, A. Aswale and C. Pinciroli, "Ant Colony
Optimization for Heterogeneous Coalition Formation and
Scheduling with Multi-Skilled Robots,"
2023 International Symposium on Multi-Robot and Multi-Agent
Systems (MRS), Boston, MA, USA, 2023, pp. 121-127, doi:
10.1109/MRS60187.2023.10416771.
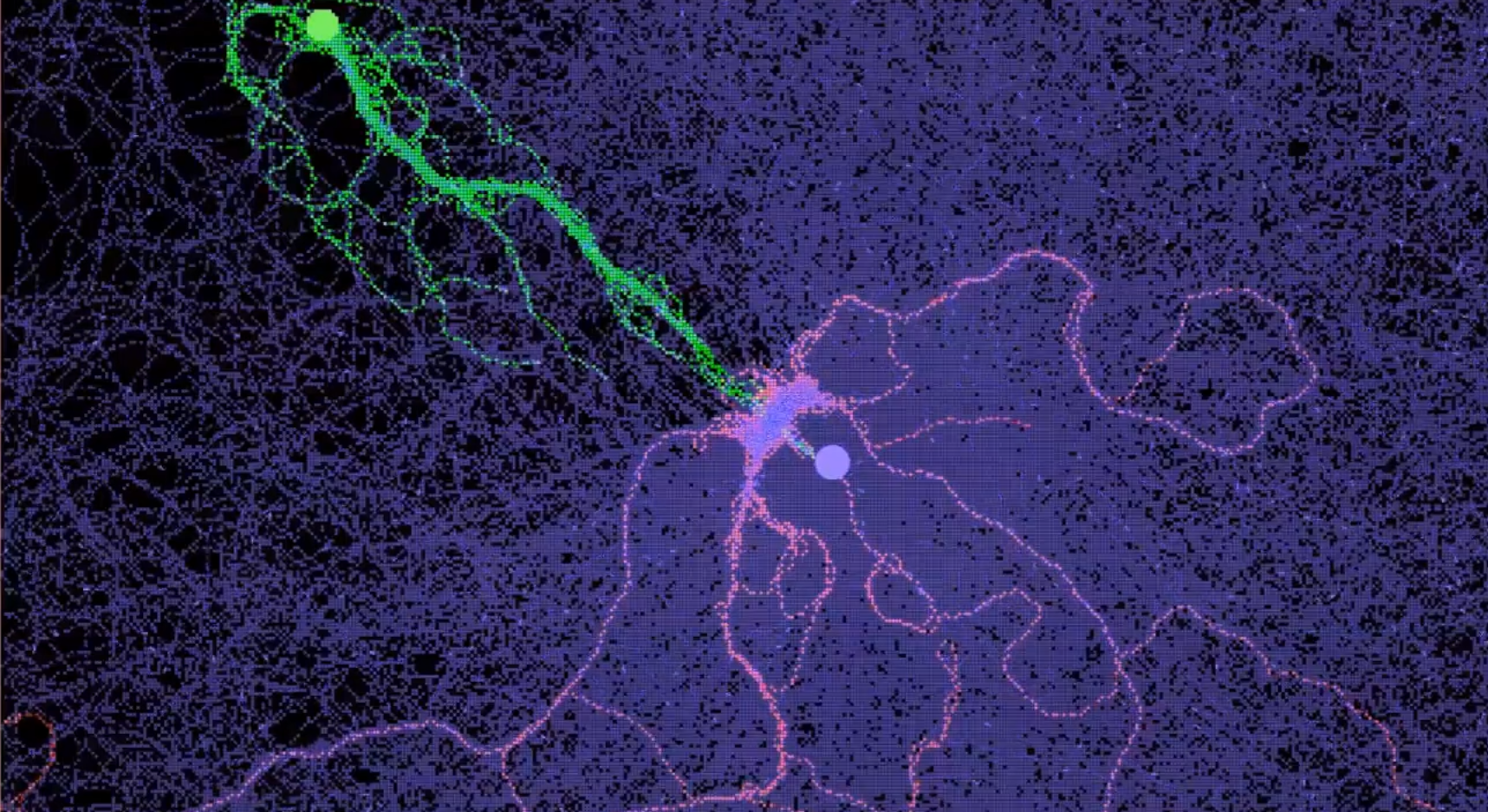
Aswale, Ashay, Antonio López, Aukkawut Ammartayakun, and
Carlo Pinciroli. "Hacking the Colony: On the Disruptive Effect
of Misleading Pheromone and How to Defend against It."
In Proceedings of the 21st International Conference on
Autonomous Agents and Multiagent Systems (AAMAS),
pp. 27-34. 2022.
Awarded the 'Best Paper Award' at
the conference.
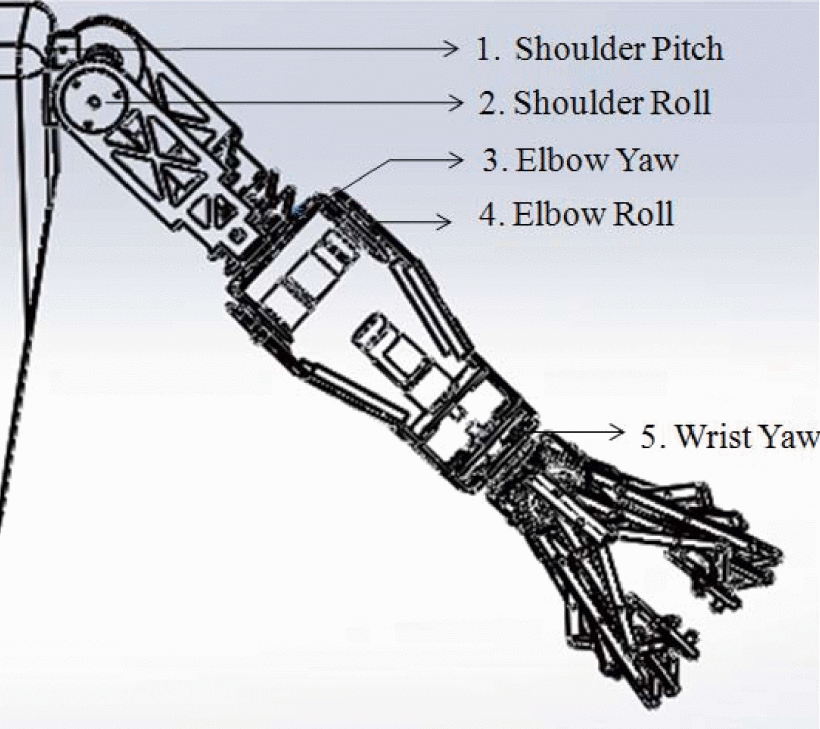
A. Patil, M. Kulkarni and A. Aswale, "Analysis of the
inverse kinematics for 5 DOF robot arm using D-H parameters,"
2017 IEEE International Conference on Real-time Computing and
Robotics (RCAR) , Okinawa, Japan, 2017, pp. 688-693, doi:
10.1109/RCAR.2017.8311944.