An icon indicates that a published document is available for more details. An icon indicates that a video result is available. Finally, icon indicates the a presentation is available. A combination of the tutorial types are indicated by the presence of multiple icons.

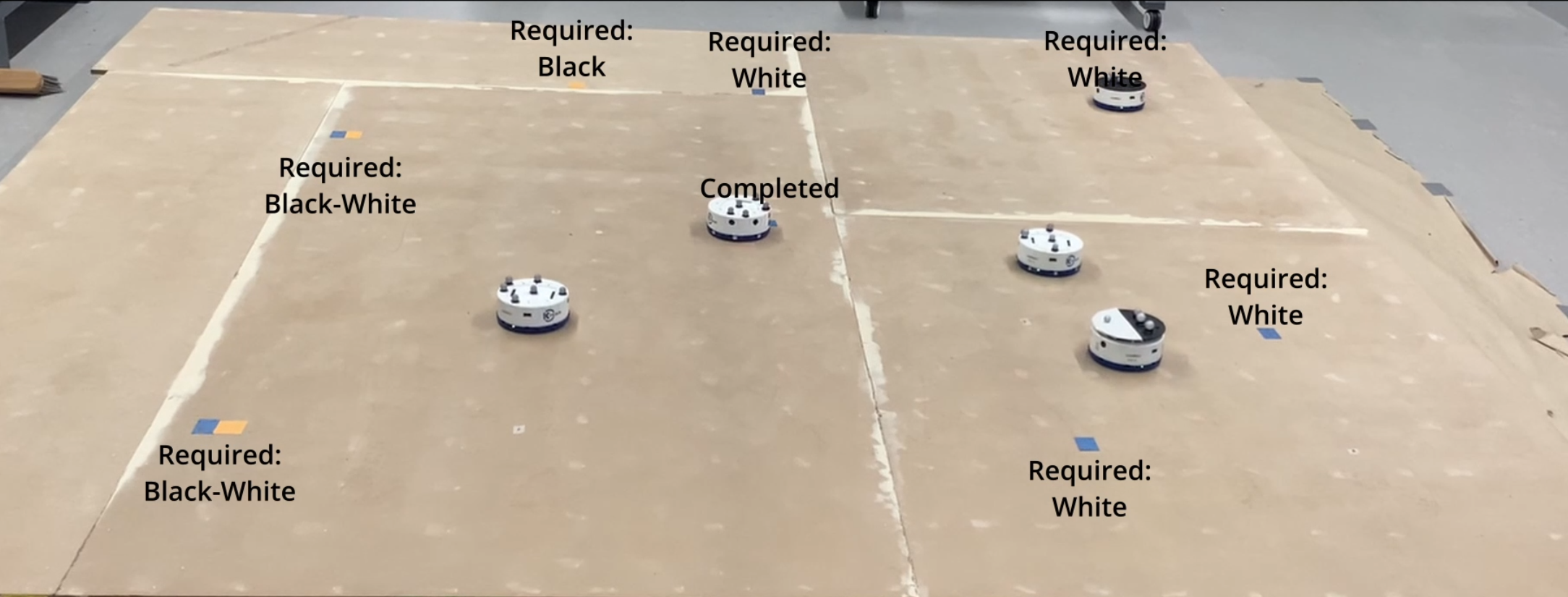
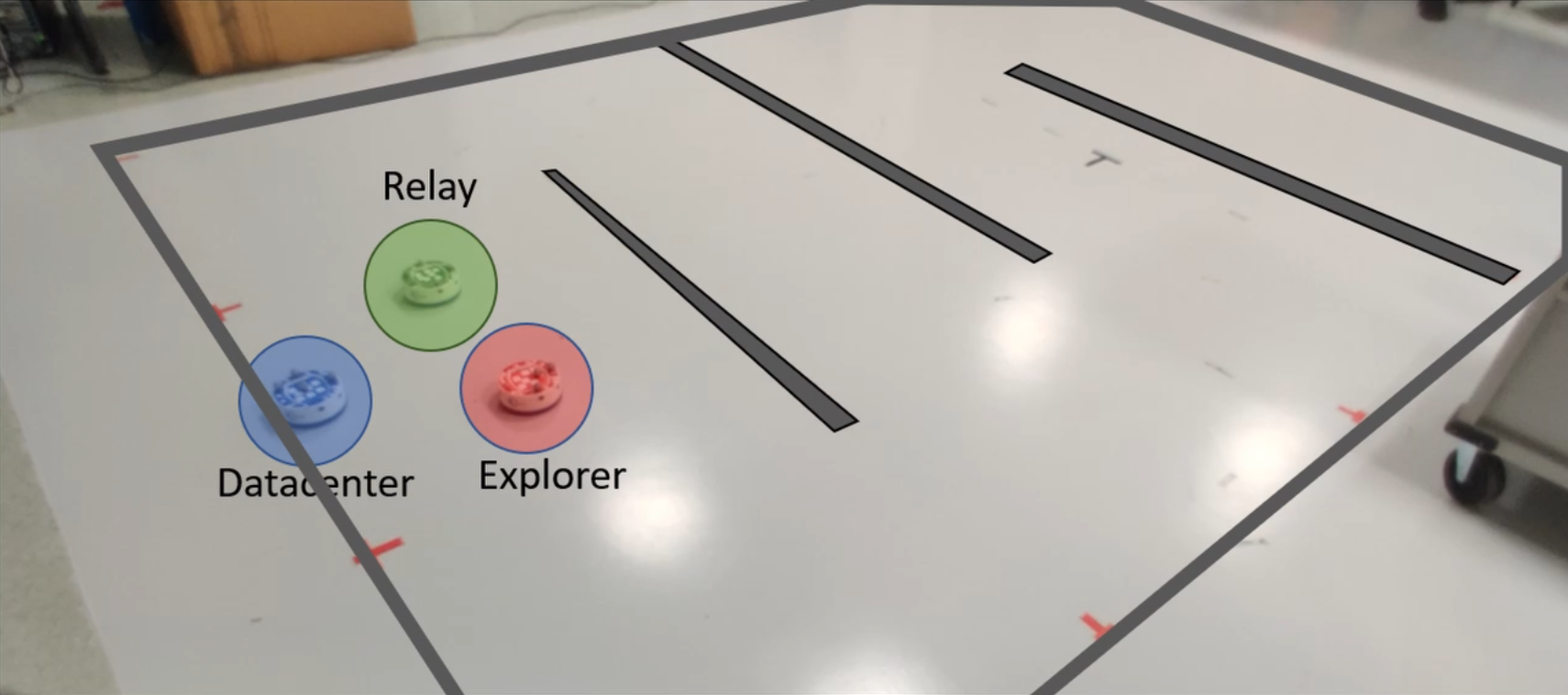
Collaborated with JPL, NASA, and Charles River Analytics (CRA) to design a system where multiple Leo rovers autonomously explore, detect, and execute tasks, ensuring robust communication and decision-making
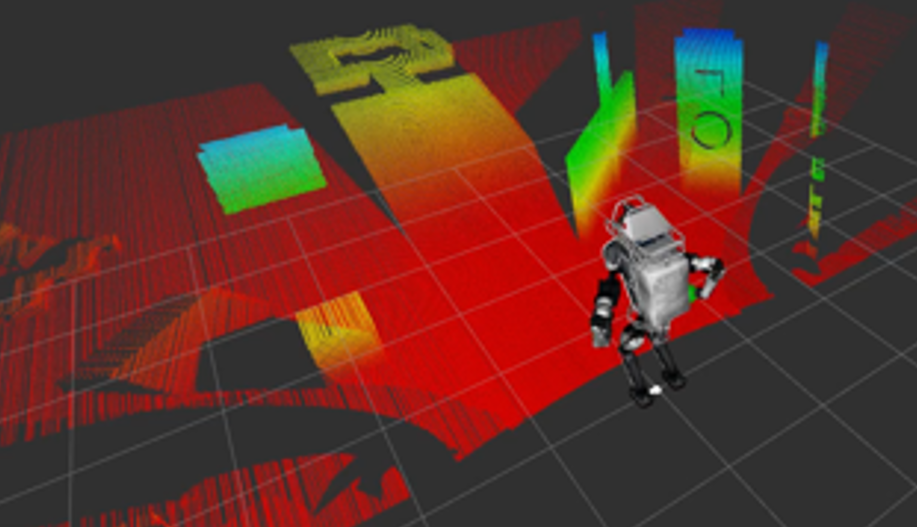
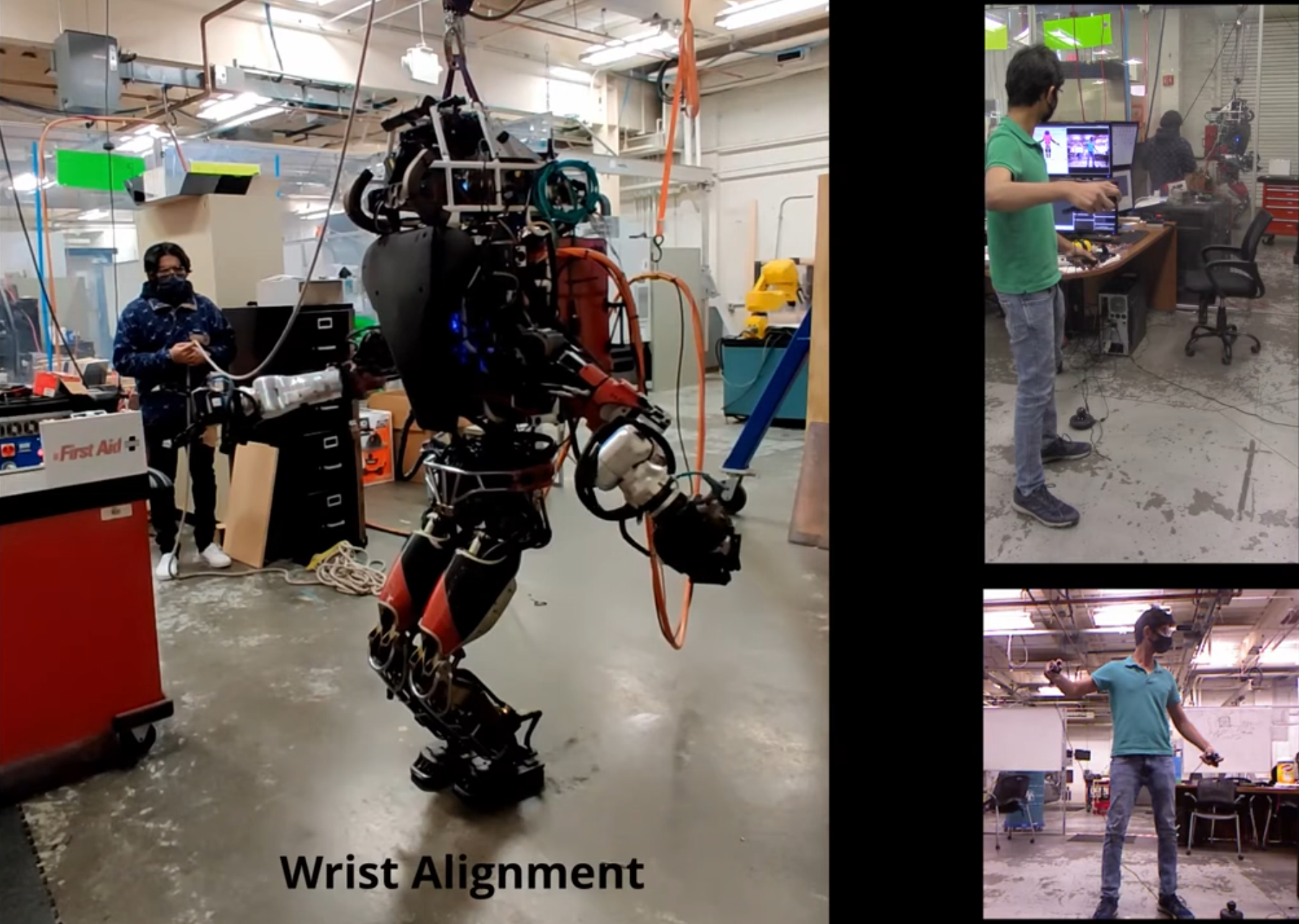
The task of navigation to the detected valve, and manipulated it with motion planners using the generated circular trajectory..

An autonomous navigation framework for robots with unreachable manipulation goal pose
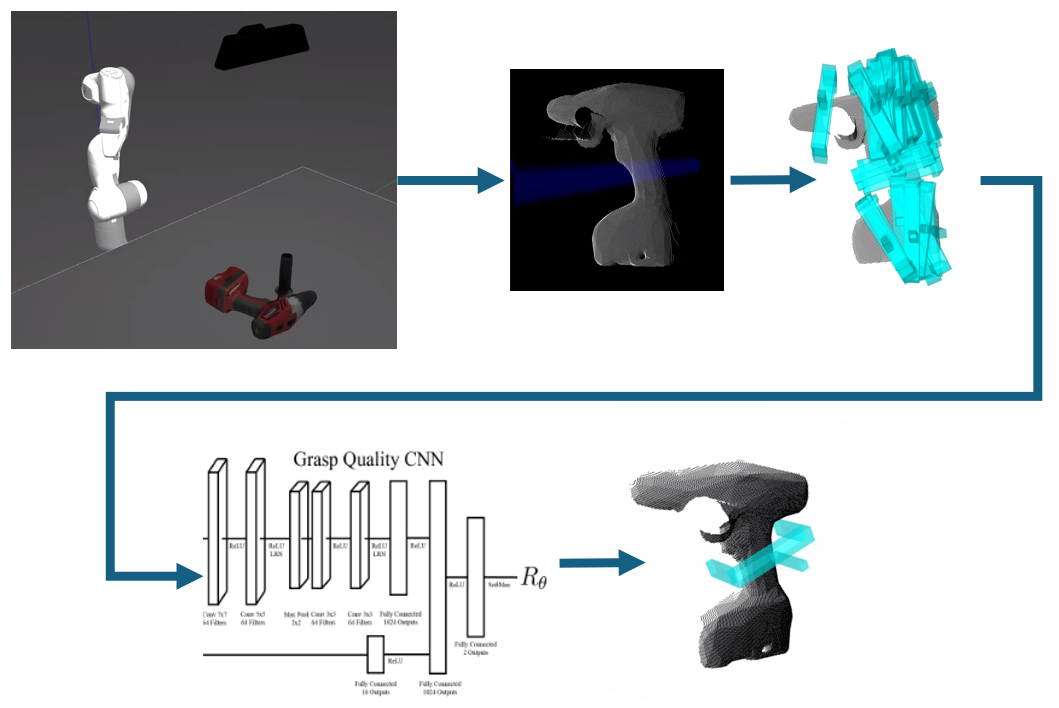
Implemented a deep learning approach for grasp planning that predicts the probability of grasp success using a CNN. The method achieved high accuracy for producing robust grasps for objects.
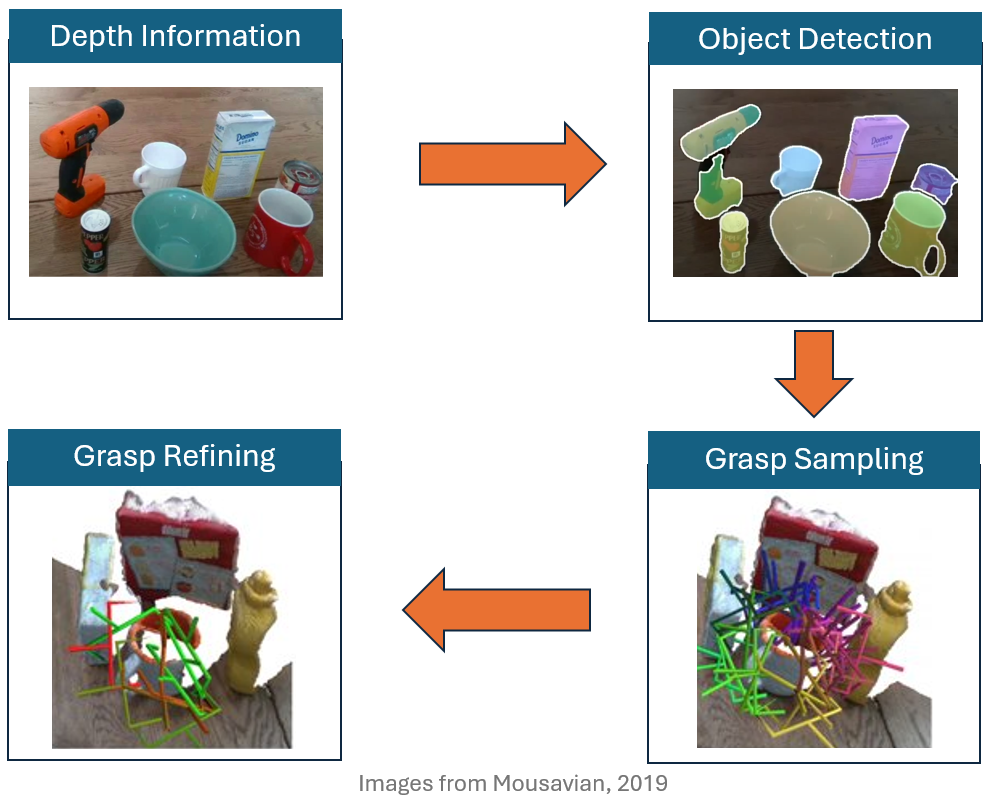
Implemented a deep learning-based approach for generating a 6-DOF grasp configurations using a CNN. The method enabled robots to grasp diverse objects with robust grasps for object manipulation.
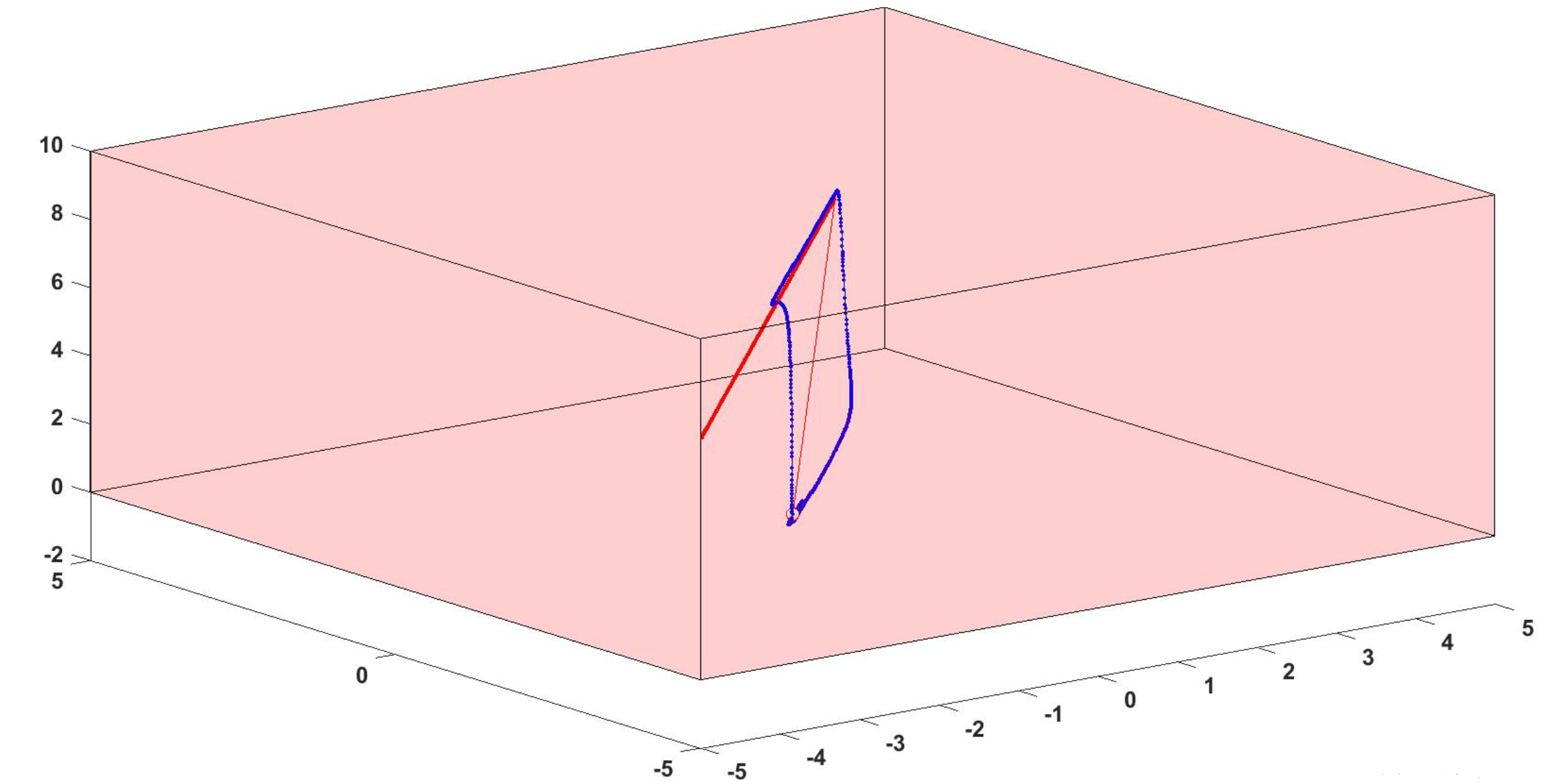
Designed a controller that can operate in restricted airspace. Completed objective to fly and capture an unknown aerial vehicle and then return to the base