Working in a team has always been a large part of my life. I have participated in multiple competitions, and have lead my team in several of them. An icon indicates that a competition video is available.
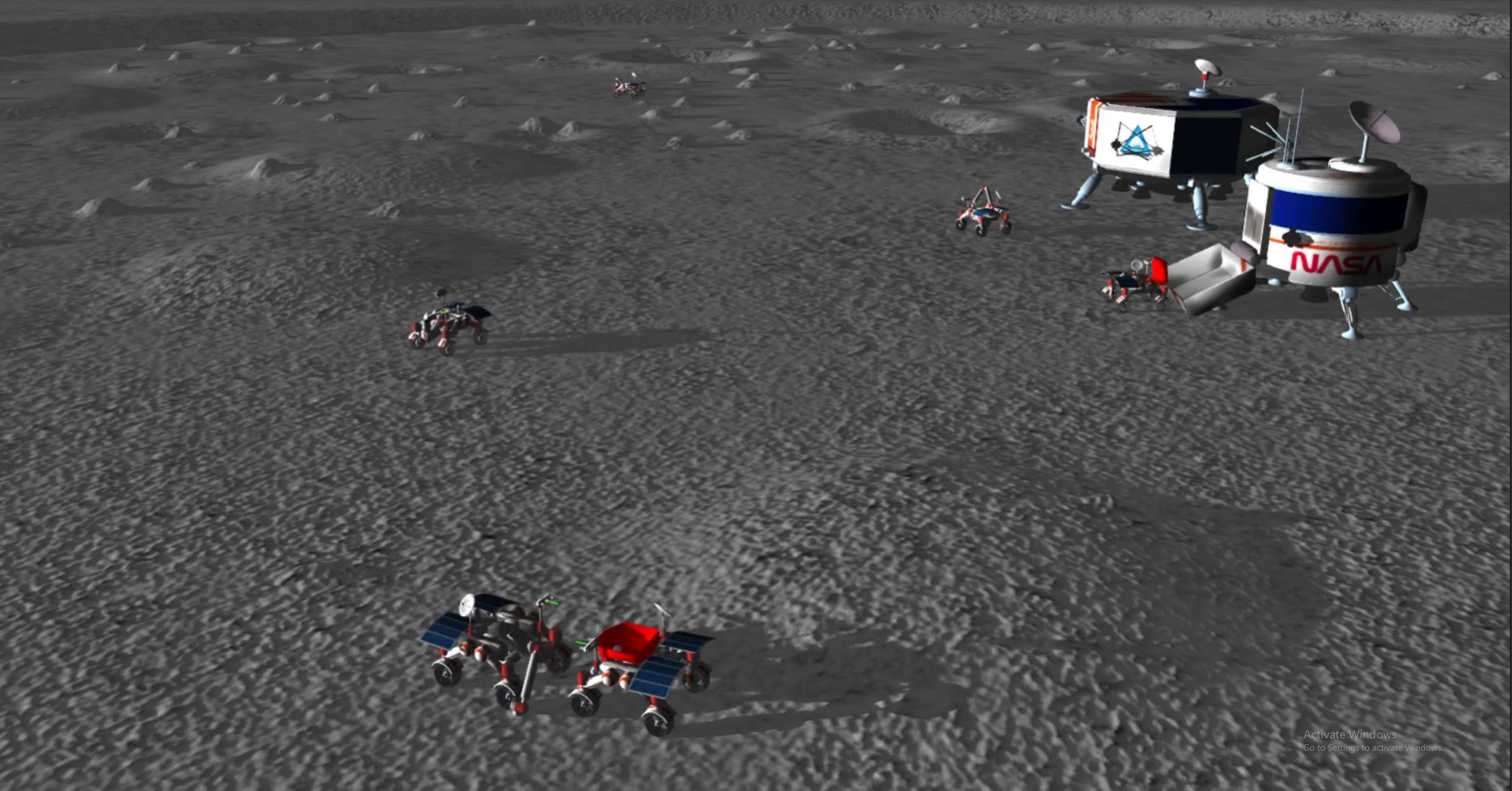
During the Final Round, participants undertake the Qualification Round tasks as part of a continuous mission, with robots gradually degrading and requiring recharging and maintenance. Competitors are equipped to repair certain failures, while resources hidden in the simulated environment pose challenges, varying in depth beneath the surface. The long-term ISRU mission in this round imposes a 2-hour time constraint, with competitors allowed three runs, considering the impact of simulation time on larger virtual robotic teams.
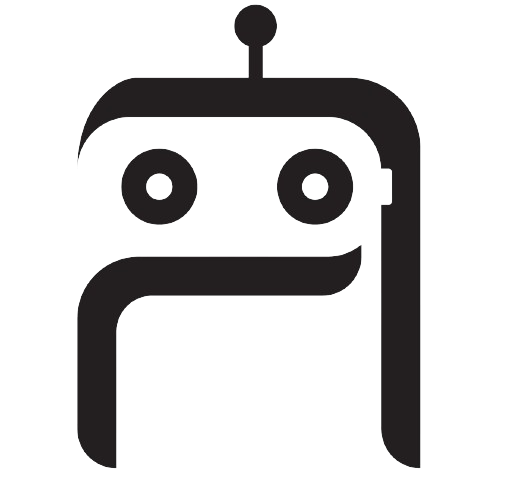
In the Qualification Round, participants engaged in tasks focused on lunar surface resource exploration and utilization. They developed software for a prospecting robot to locate resources like water ice and methane, excavated them with an excavator, and demonstrated the robot's ability to navigate and localize itself within the lunar environment, earning points based on the accuracy of resource identification, collection, and self-localization within set time limits.
This competition involves two teams, each with one Frisbee throwing robot, competing on a rectangular field divided into two sides. Each team aims to knock beach balls off circular tables placed at various heights across the field using discs, scoring points by landing their discs on the spots where balls have been knocked off. The team that successfully lands its discs on all spots after knocking off all balls achieves victory.

In this 3-minute match between Red and Blue teams, each consisting of an Eco Robot and a Hybrid Robot, the Autonomous Eco Robot, lacking a driving actuator, relies on external forces to reach the "Wind Turbine Station." The Hybrid Robot then assembles a Wind Turbine Propeller climbing onto a Wind Turbine Pole, with the team achieving this task first winning the game, termed "Chai-Yo."

In this badminton match between the Red and Blue teams, each team fields two robots. The game follows standard badminton rules, with the first team to score 7 points declared the winner of the match.
